球面距离与方位角公式的推导:向量代数法¶
发布于:2017-03-09 | 分类:mathematics
前一篇文章从几何的角度, 使用常规的解三角形法推导了球面上两点间的最短距离、方位角公式;本文将从代数的角度,直接使用向量计算的方法进行推导。
概述¶
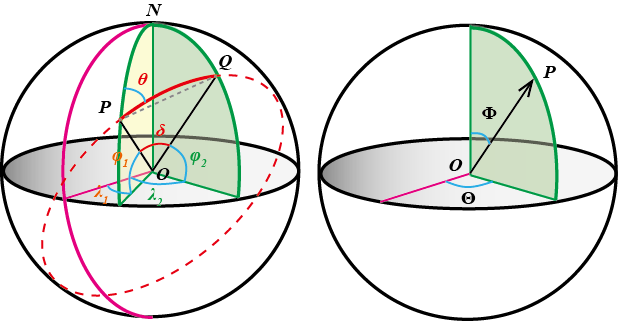
本文需要推导的公式都是基于标准球体的假设,并且经纬度坐标的定义类似于球坐标系,因此可以使用球坐标系来描述空间位置。 下图显示了经纬度的定义和标准球坐标系不同之处,其中左图为经纬度等物理量在单位球中的示意,右图为标准球坐标系的定义。
-
纬度是地球上某点与球心的连线与地球赤道面所成的线面角(如图所示\varphi),北纬为正数,南纬为负数。 -
经度是地球上某点经线平面与本初子午面所成的二面角(如图所示的\lambda),东经为正数,西经为负数。 -
方位角是从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角(如图所示\theta)。
根据上述定义可知,在单位球面上,经纬度(\varphi,\lambda)与球坐标(\Phi, \Theta)之间的对应关系为:
\begin{align*} \Phi &= \frac{\pi}{2} - \varphi \\ \Theta &= \begin{cases} \lambda + 2\,\pi & -\pi \le \lambda \le 0 \\ \lambda & 0 \le \lambda \le \pi \end{cases} \end{align*}
于是,直角坐标系与球坐标系的对应关系
转换到经纬度坐标系下为:
球面距离公式¶
球面上两点P、Q的最短距离为过P、Q的大圆对应两点之间的劣弧的长度(如图实线所示\overset{\frown}{PQ})。
\begin{align*} a &= \sin^2\frac{\Delta\varphi}{2} + \cos\varphi_1 \cos\varphi_2 \, sin^2\frac{\Delta\lambda}{2}\\ \delta &= 2\,atan2\frac{\sqrt{a}}{\sqrt{1-a}} \\ d &= R\,\delta\\ \tag{I} \end{align*}
其中,\varphi是纬度,\lambda是经度,R是地球平均半径(R=6371km)。\Delta\varphi=\varphi_2-\varphi_1,\Delta\lambda=\lambda_2-\lambda_1 分别为纬度、经度的差值。
注意:
- 代入计算的经、纬度为换算后的弧度值。
- 公式中反正切函数
atan2()区别于常规的atan()。
分析: 根据经纬度得到P、Q点的笛卡尔坐标,代入两点间距离公式计算球心角对应的弦长,最终得到球心角。
P、Q在笛卡尔坐标系下表示为:
代入两点间距离公式:
\begin{align*} PQ^2 &= (\Delta x)^2 + (\Delta y)^2 + (\Delta z)^2 \\ &= (\cos\varphi_1 \cos\lambda_1 - \cos\varphi_2 \cos\lambda_2)^2 + (\cos\varphi_1 \sin\lambda_1 - \cos\varphi_2 \sin\lambda_2)^2 + (\sin\varphi_1 - \sin\varphi_2)^2 \\ &= 2 - 2\,\sin\varphi_1 \sin\varphi_2 - 2\,\cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda\\ &= 2 - 2\,\cos\Delta\varphi + 4\,\cos\varphi_1 \cos\varphi_2 \sin^2\frac{\Delta\lambda}{2}\\ &= 4\,sin^2\frac{\Delta\varphi}{2} + 4\,\cos\varphi_1 \cos\varphi_2 \sin^2\frac{\Delta\lambda}{2} \end{align*}
令a=(PQ/2)^2即可得到Haversine公式。
以上式为基础,可以进一步推导余弦形式的球面距离公式:
于是,
\begin{align*} \cos\delta &= 1 - 2\,\sin^2\frac{\delta}{2} = 1 - 2\,a \\ &= 1 - 2\,sin^2\frac{\Delta\varphi}{2}- 2\,\cos\varphi_1 \cos\varphi_2 \sin^2\frac{\Delta\lambda}{2}\\ &= \cos\Delta\varphi - \cos\varphi_1 \cos\varphi_2 \left( 1 - \cos\Delta\lambda \right) \\ &= \left( \cos\Delta\varphi - \cos\varphi_1 \cos\varphi_2 \right) + \cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda \\ &= \sin\varphi_1 \sin\varphi_2 + \cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda \tag{*}\label{eq:1} \end{align*}
说明:
以上关于角度的推导基于单位球,即OP=OQ=1。
方位角公式¶
方位角\theta的计算公式:
分析: 如下图所示,P点处方位角\theta为过P点的两个大圆在该点处切线方向向量\boldsymbol{\tau_1},\,\boldsymbol{\tau_2}的夹角。
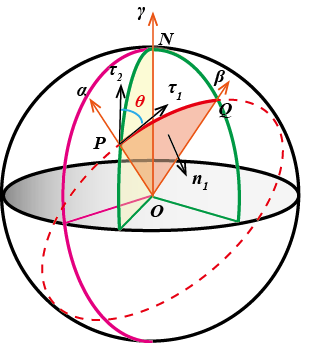
\begin{align*} \boldsymbol{\tau_1} &= \boldsymbol{\alpha} \times \boldsymbol{n_1} = \boldsymbol{\alpha} \times \left( \boldsymbol{\beta} \times \boldsymbol{\alpha} \right) \\ \boldsymbol{\tau_2} &= \boldsymbol{\alpha} \times \boldsymbol{n_2} = \boldsymbol{\alpha} \times \left( \boldsymbol{\gamma} \times \boldsymbol{\alpha} \right) \end{align*}
其中,
\begin{align*} \boldsymbol{\alpha} &= \left( \cos\varphi_1 \cos\lambda_1, \, \cos\varphi_1 \sin\lambda_1, \, \sin\varphi_1 \right)\\ \boldsymbol{\beta} &= \left( \cos\varphi_2 \cos\lambda_2, \, \cos\varphi_2 \sin\lambda_2, \, \sin\varphi_2 \right)\\ \boldsymbol{\gamma} &= \left( 0, \, 0, \, 1\right) \end{align*}
易知 \Vert \boldsymbol{\alpha} \Vert = \Vert \boldsymbol{\beta} \Vert = \Vert \boldsymbol{\gamma} \Vert = 1, 进而可知 \Vert \boldsymbol{\tau_1} \Vert = \sin\delta, \Vert \boldsymbol{\tau_2} \Vert = \cos\varphi_1。
\begin{align*} \boldsymbol{\tau_1} \cdot \boldsymbol{\tau_2} &= \left[ \boldsymbol{\alpha} \times \left( \boldsymbol{\beta} \times \boldsymbol{\alpha} \right) \right] \cdot \left[ \boldsymbol{\alpha} \times \left( \boldsymbol{\gamma} \times \boldsymbol{\alpha} \right) \right]\\ &= \left ( \boldsymbol{\alpha} \cdot \boldsymbol{\alpha} \right) \cdot \left[ \left( \boldsymbol{\beta} \times \boldsymbol{\alpha} \right) \cdot \left( \boldsymbol{\gamma} \times \boldsymbol{\alpha} \right) \right] - \left[ \boldsymbol{\alpha} \cdot \left( \boldsymbol{\gamma} \times \boldsymbol{\alpha} \right) \right] \cdot \left[ \left( \boldsymbol{\beta} \times \boldsymbol{\alpha} \right) \cdot \boldsymbol{\alpha} \right] \\ &= \left( \boldsymbol{\beta} \times \boldsymbol{\alpha} \right) \cdot \left( \boldsymbol{\gamma} \times \boldsymbol{\alpha} \right)\\ &= \left( \boldsymbol{\beta} \cdot \boldsymbol{\gamma} \right) \cdot \left( \boldsymbol{\alpha} \cdot \boldsymbol{\alpha} \right) - \left( \boldsymbol{\beta} \cdot \boldsymbol{\alpha} \right) \cdot \left( \boldsymbol{\alpha} \cdot \boldsymbol{\gamma} \right)\\ &= \boldsymbol{\beta} \cdot \boldsymbol{\gamma} - \left( \boldsymbol{\alpha} \cdot \boldsymbol{\beta} \right) \cdot \left( \boldsymbol{\alpha} \cdot \boldsymbol{\gamma} \right) \end{align*}
其中,
\begin{align*} \boldsymbol{\alpha} \cdot \boldsymbol{\gamma} &= \sin\varphi_1\\ \boldsymbol{\beta} \cdot \boldsymbol{\gamma} &= \sin\varphi_2\\ \boldsymbol{\alpha} \cdot \boldsymbol{\beta} &= \sin\varphi_1 \sin\varphi_2 + \cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda \end{align*}
代入计算:
\begin{align*} \boldsymbol{\tau_1} \cdot \boldsymbol{\tau_2} &= \sin\varphi_2 - \sin^2\varphi_1 \sin\varphi_2 - \sin\varphi_1 \cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda\\ &= \cos^2\varphi_1 \sin\varphi_2 - \sin\varphi_1 \cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda\\ &= \cos\varphi_1 \left( \cos\varphi_1 \sin\varphi_2 - \sin\varphi_1 \cos\varphi_2 \cos\Delta\lambda \right) \end{align*}
于是,
\begin{align*} \cos\theta &= \frac{\boldsymbol{\tau_1} \cdot \boldsymbol{\tau_2}}{\Vert \boldsymbol{\tau_1} \Vert \, \Vert \boldsymbol{\tau_2} \Vert}\\ &= \frac{\cos\varphi_1 \sin\varphi_2 - \sin\varphi_1 \cos\varphi_2 \cos\Delta\lambda}{\sin\delta}\\ &= \frac{t}{\sin\delta} \tag{**}\label{eq:2} \end{align*}
其中,t = \cos\varphi_1 \sin\varphi_2 - \sin\varphi_1 \cos\varphi_2 \cos\Delta\lambda。
结合式\eqref{eq:1}和式\eqref{eq:2}可得:
\begin{align*} \tan^2\theta &= \sec^2\theta - 1\\ &= \frac{1}{t^2}\,\left( \sin^2\delta - t^2 \right)\\ &= \frac{1}{t^2}\,\left( 1-\cos^2 \delta-t^2 \right)\\ &= \frac{1}{t^2}\,\left( 1-\sin^2 \varphi_2-\cos^2 \varphi_2 \cos^2\Delta\lambda \right)\\ &= \left( \frac{\cos\varphi_2 \, \sin\Delta\lambda}{t} \right)^2 \tag{***}\label{eq:2.5} \end{align*}
即可解出\theta的表达式。
已知起始点、方位角及距离,求目标位置¶
已知起始点经纬度P(\varphi_1,\lambda_1),方向角\theta及球面距离d,计算目标位置Q(\varphi_2,\lambda_2)的公式为:
\begin{align*} \varphi_2 &= asin \left( \sin\varphi_1 \cos\delta + \cos\varphi_1 \sin\delta \cos\theta \right)\\ \lambda_2 &= \lambda_1 + atan2 \frac{\sin\theta \sin\delta \cos\varphi_1}{\cos\delta-\sin\varphi_1 \sin\varphi_2} \tag{III}\label{eq:3} \end{align*}
其中,球心角\delta = d/R。
分析: 根据球面距离公式和方位角公式反求目标位置即可。
结合式\eqref{eq:1}和式\eqref{eq:2}分别得到: \begin{align*} \sin\delta \cos\theta &= \cos\varphi_1 \sin\varphi_2 - \sin\varphi_1 \cos\varphi_2 \cos\Delta\lambda \tag{①}\label{eq:4}\\ \cos\delta &= \sin\varphi_1 \sin\varphi_2 + \cos\varphi_1 \cos\varphi_2 \cos\Delta\lambda \tag{②}\label{eq:5} \end{align*}
\eqref{eq:4} \times \cos\varphi_1 + \eqref{eq:5} \times \sin\varphi_1得:
即可解出\eqref{eq:3}的第一个式子。
结合式\eqref{eq:2}和式\eqref{eq:2.5}可得:
即
由式\eqref{eq:1}可知:
以上两个式子相除即可得到:
于是,解出Q点的经度\lambda_2 = \lambda_1 + \Delta\lambda如式\eqref{eq:5}的第二式所示。