应力张量的认识:线性变换¶
发布于:2013-07-30 | 分类:plasticity theory , mathematics
这一部分主要是对应力张量数学本质的理解。
相似矩阵¶
通过基础知识我们已经认识到,应力张量代表点的应力状态,它不依赖于坐标系的选取,并且对应着同一主应力状态。用矩阵的观点理解为:同一点的应力张量矩阵是相似矩阵,并且可以对角化。
然而问题是为什么会这样?
我们可以这么理解,同一点不同截面下的应力张量描述的都是相同的应力状态,因此他们存在内在联系(例如受约束于静力平衡方程)。由切应力互等定律可知应力张量矩阵是实对称矩阵,而实对称矩阵必定可以对角化,即不同截面应力张量对相似于一个主应力张量;而同一点的主应力状态是确定的。于是由相似矩阵的传递性可知,不同截面下的应力张量矩阵是相似的。
线性变换¶
由应力张量是相似矩阵再进一步,因为 相似矩阵的本质是同一线性变换在不同基下表示的矩阵,我们就可以从更根本的角度看待应力张量了: 应力张量代表一个线性变换!
这是一个抽象的认识,或者说是从相似矩阵推论出来的。那么接下来让他具体化:
从基础知识已经知道,利用三个相互垂直的截面截取一点P,各个截面上的应力分量组成应力张量。以这三个截面的法线方向为正方向建立笛卡尔坐标系,如下图所示。
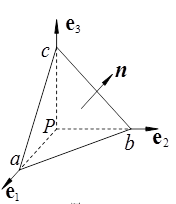
对于任意法向\vec{n}=(n_1,\,n_2,\,n_3)的截面,可以得到截面上的应力分量
改写为矩阵表达式
其中,
\[ A = \begin{pmatrix} \sigma_{11} & \tau_{12} & \tau_{13} \\\ \tau_{21} & \sigma_{22} & \sigma_{23} \\\ \tau_{31} & \tau_{32} & \sigma_{33} \end{pmatrix}\,, x = n_j = \begin{pmatrix} n_1 \\\ n_2 \\\ n_3 \end{pmatrix}\,, y = p_i = \begin{pmatrix} p_1 \\\ p_2 \\\ p_3 \end{pmatrix} \]
根据线性变换与矩阵的一一对应关系可知,应力张量代表一个线性变换(确切的说是线性映射)——应力张量将截面位置映射到截面应力。其数学表述为:
其中,U是截面方向余弦组成的线性空间,V是截面应力作成的线性空间。
举例说明¶
以下说明这个线性映射是如何与力学描述相一致的。
之前多次提及,用三个互相垂直的截面截取P点,并以其法向建立笛卡尔坐标系。这样的截面有无数多对,这样的坐标系也有无数多个。为了区分他们,先确定一个全局坐标系S:Oxyz,那么其他任意的局部坐标系S':O'x'y'z'就可以用它的坐标轴方向在全局坐标系下的方向余弦来描述了。
例如,局部系x'轴在全局坐标系下的方向余弦为
进而,局部坐标系S'可以描述为
\[ \alpha = \left(\alpha_x,\,\alpha_y,\,\alpha_z\right) = \begin{pmatrix} \cos\langle{x',\,x}\rangle & \cos\langle{y',\,x}\rangle & \cos\langle{z',\,x}\rangle \\\ \cos\langle{x',\,y}\rangle & \cos\langle{y',\,y}\rangle & \cos\langle{z',\,y}\rangle \\\ \cos\langle{x',\,z}\rangle & \cos\langle{y',\,z}\rangle & \cos\langle{z',\,z}\rangle \end{pmatrix} \]
在局部坐标系内,截面\vec{n}用方向余弦表示为
- \alpha表示局部坐标系在全局坐标系空间下的基。
- \vec{n}表示任意截面在局部坐标系下的坐标。
局部坐标系任意截面上的应力分布也是类似的情况,其坐标系方向一致,坐标的描述也类似,只是属于不同的空间而已。如此一来,力学描述和数学描述是相互统一的:
-
力学描述
用任意相互垂直的三个平面截取P点,以截面法向为正方向建立笛卡尔坐标系,得到三个截面上的应力状态即应力张量\sigma。以此为基础,可以求得当前坐标系下任意截面\vec{n}上的应力分布\vec{p}。
-
数学描述
任意给定一组基\alpha后,可以用坐标\left(n_1,\,n_2,\,n_3\right)^T描述截面位置,用坐标\left(p_1,\,p_2,\,p_3\right)^T描述截面应力。在这组基下,存在一个线性变换\sigma,将截面位置\vec{n}映射到截面应力\vec{p}。
总结¶
这一部分从相似矩阵及线性变换的角度来认识应力张量,应力张量是从截面位置到截面应力的线性变换所对应的矩阵。